








Penjualan panas 6 sistem gerak simulator DOF
Platform gerak 6DOF kami dapat mensimulasikan berbagai pose gerak spasial dan dapat diterapkan secara luas ke berbagai simulator pelatihan seperti simulator penerbangan, simulator kapal angkatan laut, platform simulasi lepas landas dan pendaratan helikopter angkatan laut, simulator tangki, simulator mengemudi mobil, dan mengemudi kereta simulator dan film dinamis, peralatan hiburan dan sebagainya.

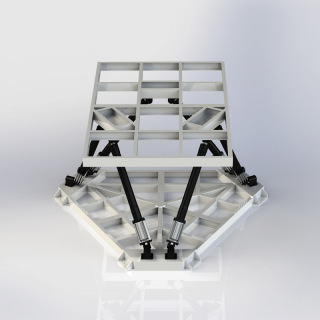
Karakteristik platform gerak 6 DOF:
1. Terbuat dari baja yang memiliki penampilan cantik, struktur kompak, kebisingan berjalan rendah dan mudah dirawat.
2. Sistem servo dengan kontrol digital penuh digunakan untuk kontrol yang tepat, gerakan platform halus dan terus menerus, juga dengan respons kecepatan tinggi yang cepat dan operasi kecepatan rendah yang stabil.
3. Mengadopsi ball joint robot paralel khusus kami sendiri, pukulan maksimumnya dapat mencapai 35 ° dengan presisi tinggi.
4. Silinder listrik mengadopsi struktur baru yang terhubung langsung dengan motor terpasang di dalamnya yang membuatnya cukup kompak. Sementara itu, sekrup presisi ultra-senyap juga diterapkan di dalam silinder dengan noise yang sangat rendah.
5. Semua blok miring diselesaikan di pusat permesinan yang dapat memastikan keakuratan posisi setiap sisi.
6. Menggunakan kartu kontrol yang dikembangkan sendiri, ini mengintegrasikan berbagai model data platform 6 DOF dan model algoritme, ia dapat melakukan operasi matematika yang sesuai dengan menerima tanggal pose dari komputer bagian atas, dan kemudian menghitung langkah enam silinder. Itu juga dapat menyesuaikan kelembutan dan kecepatan operasi platform juga.
Spesifikasi Utama:
Performa sistem
Sikap Satuan Amplitudo Kecepatan Mengangkat mm ±500 200mm/dtk Lonjakan mm ±400 200mm/dtk Bergoyang mm ±400 200mm/dtk Melempar ° ±30 10°/S Gulungan ° ±30 10°/S Mengoleng ° ±30 10°/S
Spesifikasi muatan
| Berat produk | 5021 kg |
| Muatan | 4000 kg |
Dimensi Produk
| Panjang | 5000 mm |
| Lebar | 3000 mm |
| Min.Tinggi | 2670 mm |
Persyaratan daya
| Sumber Daya listrik | 380V tiga fase |
| Koneksi | Ethernet |
Sistem kontrol (Kabinet listrik)

Sistem kontrol: perangkat lunak kontrol tertanam berjalan pada pengontrol utama, dan pengontrol gerak menggunakan pengontrol gerak bus kinerja tinggi Gugao, dan menggunakan algoritme kinematika maju dan terbalik yang dikembangkan secara independen oleh perusahaan kami untuk mewujudkan kontrol gerak enam derajat platform gerak -dari-kebebasan.
Perangkat lunak kontrol termasuk tetapi tidak terbatas pada modul fungsional berikut: modul fungsi inspeksi diri sistem, modul fungsi koneksi jaringan, modul fungsi konfigurasi parameter, modul fungsi mesin negara, modul fungsi preprocessing data, modul fungsi perencanaan lintasan, modul fungsi perhitungan kinematika , modul fungsi komunikasi bus, modul fungsi I/O digital, modul fungsi umpan balik status, modul fungsi alarm kesalahan, dan modul fungsi keamanan.
Perangkat lunak kontrol menyediakan antarmuka pengembangan sekunder dan membuka antarmuka komunikasi dan protokol ke Pihak A. Platform enam derajat kebebasan berjalan dengan mulus, mulus, dan tanpa hambatan. Algoritme kinematika maju dan mundur mengumpan balik sikap platform atau data posisi silinder listrik secara real time. Algoritme memiliki fungsi perlindungan keamanan internal untuk platform, yang tidak akan menyebabkan kerusakan pada platform jika pengguna salah memasukkan data!




