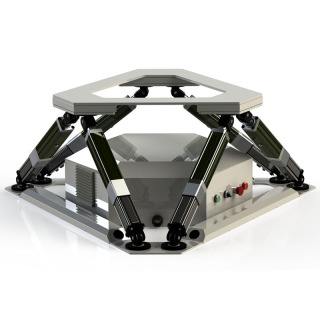
Basis gerak simulator mengemudi mobil
Basis gerak banyak digunakan dalam berbagai simulator pelatihan, seperti simulator penerbangan, simulator kapal, platform simulasi lepas landas dan pendaratan helikopter angkatan laut, simulator tangki, simulator mengemudi mobil, simulator mengemudi kereta, simulator gempa, film dinamis, peralatan hiburan, dan bidang lainnya , dan bahkan dalam docking pesawat ruang angkasa dan docking pengisian bahan bakar kapal tanker udara; Peralatan hiburan budaya, peralatan pengalaman hiburan interaktif baru, simulasi teknik, evaluasi desain, pengujian, eksperimen, pelatihan tugas, evaluasi pelatihan, simulasi lingkungan, pengulangan acara, dll.
Spesifikasi Utama:
Performa sistem
Sikap Satuan Amplitudo Kecepatan Mengangkat mm ±160 375mm/dtk Lonjakan mm ±160 375mm/dtk Bergoyang mm ±160 375mm/dtk Melempar ° ±16 15°/S Gulungan ° ±16 15°/S Mengoleng ° ±16 15°/S
Spesifikasi muatan
| Berat produk | 349 kg |
| Muatan | 1000 kg |
Dimensi Produk
| Panjang | 2000 mm |
| Lebar | 1515 mm |
| Min.Tinggi | 780 mm |
Persyaratan daya
| Sumber Daya listrik | 380V tiga fase |
| Koneksi | Ethernet |
Sistem kontrol (Kabinet listrik)

Sistem kontrol: perangkat lunak kontrol tertanam berjalan pada pengontrol utama, dan pengontrol gerak menggunakan pengontrol gerak bus kinerja tinggi Gugao, dan menggunakan algoritme kinematika maju dan terbalik yang dikembangkan secara independen oleh perusahaan kami untuk mewujudkan kontrol gerak enam derajat platform gerak -dari-kebebasan.
Perangkat lunak kontrol termasuk tetapi tidak terbatas pada modul fungsional berikut: modul fungsi inspeksi diri sistem, modul fungsi koneksi jaringan, modul fungsi konfigurasi parameter, modul fungsi mesin negara, modul fungsi preprocessing data, modul fungsi perencanaan lintasan, modul fungsi perhitungan kinematika , modul fungsi komunikasi bus, modul fungsi I/O digital, modul fungsi umpan balik status, modul fungsi alarm kesalahan, dan modul fungsi keamanan.
Perangkat lunak kontrol menyediakan antarmuka pengembangan sekunder dan membuka antarmuka komunikasi dan protokol ke Pihak A. Platform enam derajat kebebasan berjalan dengan mulus, mulus, dan tanpa hambatan. Algoritme kinematika maju dan mundur mengumpan balik sikap platform atau data posisi silinder listrik secara real time. Algoritme memiliki fungsi perlindungan keamanan internal untuk platform, yang tidak akan menyebabkan kerusakan pada platform jika pengguna salah memasukkan data!